
[星島綜合報道] 當前不少穿戴式裝置與手勢操控技術,往往只能在實驗室等穩定環境下運作,一旦用戶移動、奔跑,甚至出現震動或顫抖,感測數據便容易受干擾,導致誤判。來自University of California, San Diego的研究團隊近日發表研究,提出一種能在高度動態環境下仍保持準確的手勢控制方案,為穿戴式人機介面技術打開實際應用空間。
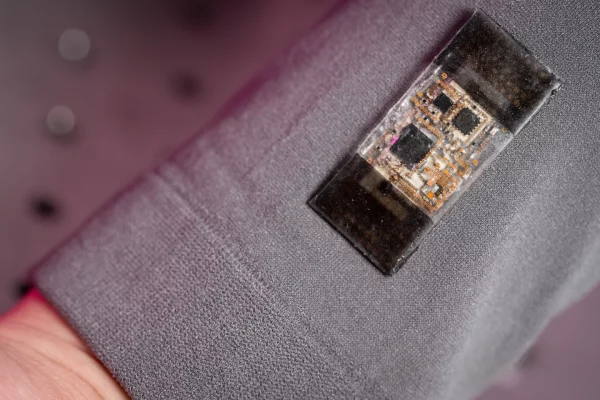
該項研究由UC San Diego Jacobs School of Engineering多名研究人員共同完成,並刊登於《Nature Sensors》,核心在於一款可貼附於前臂的電子裝置。裝置結合動作感測器與肌肉訊號感測器,配合藍牙模組與可拉伸電池,並透過深度學習系統即時「清洗」雜訊數據,有效分辨真實手勢與因晃動、震動而產生的錯誤訊號。
研究團隊指出,過往手勢控制系統最大的限制,在於難以應付現實世界中不可避免的「干擾」。為此,團隊利用人工智能模型,分析大量來自陸地及海上活動的動態數據,建立可辨識不同環境下手臂動作的資料庫,令系統即使在跑動、高頻震動或不穩定狀態下,仍能作出低延遲、準確的控制反應。
測試過程中,受試者需在奔跑、被搖晃,甚至模擬海浪震動的情況下,操控機械臂等裝置。結果顯示,系統能有效消除因顫動或碰撞引起的數據噪音,避免誤觸發,整體表現較現有穿戴式手勢控制方案穩定。
研究最初獲美國國防高等研究計劃署(DARPA)支持,原意是提升軍事潛水員在水下操控機械人的能力。不過團隊其後發現,相關技術對快速發展的穿戴式裝置市場同樣重要,尤其是在日常活動中,用戶難以保持靜止的情況下。
研究人員認為,這類抗干擾手勢控制技術,未來可應用於工業、緊急救援及危險環境操作,讓工作人員在高速或高風險情況下,以免提方式操控機械、車輛或工具。此外,對於復康患者或有動作障礙人士,系統亦可按個人自然動作進行訓練,毋須完全恢復精細動作能力,擴闊輔助科技的應用可能。
研究團隊強調,這項成果不僅是感測器硬件的改進,更在於引入可學習環境與個體差異的人工智能模型,為下一代穿戴式人機介面奠定基礎,令相關技術真正走出實驗室,融入日常生活。
T10