
[星島綜合報道]儘管自主飛行機械人在許多潛在應用中具有吸引力,但如果它們在著陸後無法跨越不平整的地形,其實用性將大打折扣。然而,一種實驗性的仿生機械人藉由模仿烏鴉的步態,解決了這一問題。
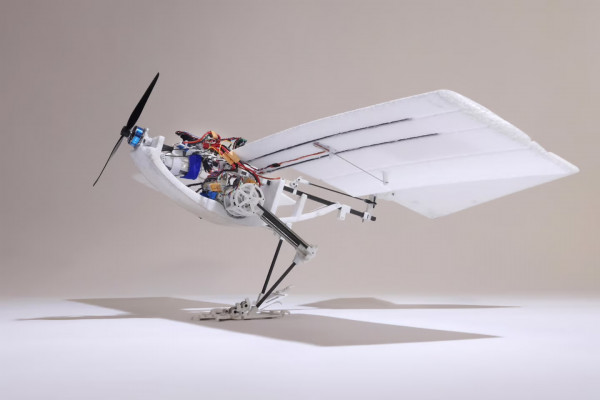
這款裝置名為 RAVEN(模仿鳥類的多環境機械飛行載具,Robotic Avian-inspired Vehicle for multiple ENvironments),由瑞士洛桑聯邦理工學院(EPFL)的Won Dong Shin及其團隊開發。儘管它看起來像是一個拍翅飛行的機械鳥,但實際上,它是通過兩個半固定的翅膀和一個螺旋槳進行飛行。
然而,RAVEN 的真正亮點在於其多關節腿部設計。
雖然這些腿的構造並不像真正烏鴉的腿那樣複雜,但它們模仿了真實烏鴉腿部的髖關節、腳踝和腳掌的結構。這種設計讓機械人可以行走(交替移動雙腳)、跨越間隙或小型障礙物,甚至跳上高處。
就像真正的烏鴉一樣,該機械人還能通過起跳進行飛行起飛。測試表明,以這種方式提高起飛速度,比未經跳躍直接起飛更為節能。
「多功能機械人腿部擴展了傳統固定翼飛機在複雜地形中的部署可能性,使其能實現自主起飛和多模態步態,」研究人員在他們的論文中指出,該論文最近發表在《自然》(Nature)期刊上。
圖片:2024 EPFL/Alain Herzog (CC-BY-SA 4.0)
T10
